
51单片机串口通讯
前提条件
- 已完成51单片机定时器
51单片机与个人电脑进行通信
目标
通过串口监视器向单片机发送一个字符后, 单片机返回相同字符.
原理
原理其实是挺复杂的, 不信你看时序图. 但是程序实现非常简单, 只需要操作3个寄存器就可以了. 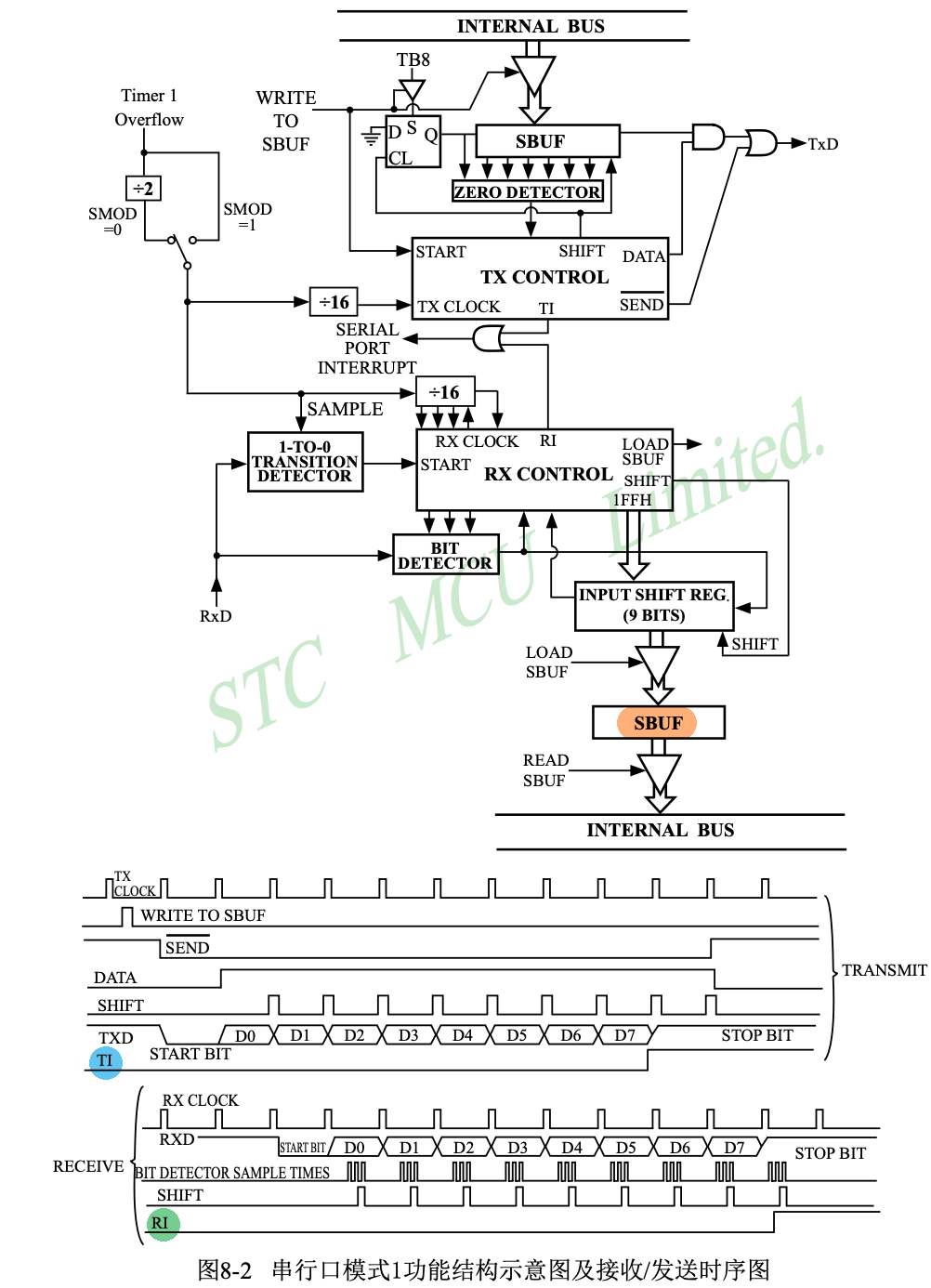
STC89C52RC数据手册, 8 串行口通信
发送数据:
- 单片机发送第一个 byte 的时候, 只需要向
SBUF寄存器写入 1byte, 数据就发出去了. 发送过程中TI寄存器会被硬件置为0, 发送完成后TI寄存器会被硬件置1. - 发送第2个 byte 的时候, 需要先将
TI寄存器软件置0, 然后再向SBUF寄存器写入第2个 byte.
接收数据:
- 接收数据可以在中断响应函数中完成, 毕竟电脑随时都可能会向单片机发送数据.
- 在中断响应函数中, 如果发现
RI寄存器等于1, 说明当前中断是接受中断, 程序可以直接从SBUF寄存器中读取数据. 完事了记得将RI寄存器置1, 好接收下一 byte 数据.
接线
接线开发板原理图中已给出, 主要就是要记得
- 单片机的
RX要和目标设备的TX相连接, 单片机的TX要和目标设备的RX相连接. - 单片机不能直接和个人电脑进行通信, 它们之间还需要连接一个
CH340G芯片.
程序
示例代码 codes/demo205-51-uart
定时器初始值计算公示
- 定时器初始值 = 定时器最大值 - (系统时钟频率 / 定时器分频数) / (波特率 * (32 / 2^SMOD))
- 定时器初始值 = 256 - (11059200 / 12) / (9600 * (32 / 2^1)) = 250 = 0xFA
进一步解释
- 那么每秒晶振输出 11059200 个脉冲, 每秒
定时器计时器增加 (11059200 / 12) = 921_600 - 假设波特率使用 9600. 这就意味着
TX Clock的时钟频率为 9600. 这个时钟的来源是定时器溢出,定时器溢出1次产生1个脉冲, 而后经过16分频(SMOD为1)得到最终的TX Clock的时钟, 也就是说定时器溢出16次,TX Clock是出现一个脉冲. 所以定时器每秒需要溢出频率 9600 * 16 = 153_600 次 - 在1秒内,
定时器计时器增加了 921_600 次, 其中 153_600 次定时器出现了溢出. 那么每次定时器溢出计数器增加了 921_600 / 153_600 = 6. 假设定时器工作在模式2(8位自动重装载模式), 该模式下计数器最大值为 2^8 = 256. 得到定时器的起始值应该为 256 - 6 = 250 = 0xFA
c
#include <8052.h>
#include <stdint.h>
#include "delay.h"
void uart_init(void) {
TMOD &= 0x0F; // 清除高8位
TMOD |= 0b00100000; // 定时器1, 模式2, 8位自动重装载模式
TH1 = 0xFA; // 设置波特率为9600
TL1 = 0xFA; // 设置波特率
ET1 = 0; // 禁止定时器中断
TR1 = 1; // 启动定时器1
PCON |= 0b10000000; // SMOD = 1
SM0 = 0; // 设置工作模式为方式1
SM1 = 1; // 设置工作模式
SM2 = 1; // 只有在接收到有效停止位时才将中断请求标志位RI置为1
REN = 1; // 使能串口接收
ES = 1; // 使能串口中断
EA = 1; // 使能总中断
}
void uart_send(char data) {
SBUF = data; // 将数据写入缓冲区
while (TI == 0); // 等待数据发送完成
TI = 0; // 清除发送完成标志
}
void uart_print(char* msg) {
while (*msg) {
uart_send(*msg++);
}
}
// 中断号为4的原因: STC89C52RC数据手册, 第6章 中断系统
void uart_isr(void) __interrupt (4) {
if (RI == 1) { // 如果是接收中断
RI = 0; // 清除接收标志
char received_data = SBUF; // 读取接收到的数据
uart_send(received_data); // 发送接受到的数据
}
}
void main(void) {
uart_init();
while (1) {
uart_print("Hello from MCU\n");
delay_ms(1000);
}
}(可选)什么是串口?
串口(Serial Port), 全称为串行通信端口, 是一种用于数据传输的接口. 与并口(并行端口)不同, 串口一次只传输一位(bit)数据, 但它的数据传输线较少, 通常只需要一根数据线, 因此在长距离传输上更有优势. 串口是计算机和外设之间进行通信的一种常见方式, 广泛应用于各种嵌入式系统和工业设备中.
串口的特点
- 数据传输方式:串行通信一次只传输一位数据, 数据位按顺序排队依次传输.
- 传输速率:用波特率(Baud Rate)表示, 常见的波特率有9600、19200、115200等.
- 通信距离:由于串口只使用一根数据线, 相对于并口, 在长距离传输中信号衰减小, 抗干扰能力强.
常见的串口类型
- RS-232:最常见的串口标准之一, 常用于计算机和调制解调器之间的通信. RS-232接口的最大传输距离为15米左右, 通常用于短距离通信.
- RS-485:相比RS-232, RS-485可以支持更长距离的传输(通常可以达到1200米), 并且支持多点通信(即一个主机可以与多个设备通信), 常用于工业控制环境.
- UART(Universal Asynchronous Receiver/Transmitter):是用于串行通信的硬件模块, 广泛集成在微控制器(如51单片机)中, 用于实现串行数据的发送和接收.
串口的基本信号
- TXD(Transmit Data):发送数据端, 负责发送数据.
- RXD(Receive Data):接收数据端, 负责接收数据.
- GND(Ground):地线, 提供信号的参考电平.
- RTS(Request To Send)和CTS(Clear To Send):用于硬件流控制的信号线(可选).
应用
- 调试:嵌入式开发中, 串口常用作调试接口, 用于输出调试信息.
- 设备控制:常用于计算机控制外设, 如PLC、传感器、执行器等.
- 数据传输:设备之间的数据传输, 如GPS模块、蓝牙模块等.